1990-2017���Ї������V�@ʾ�����L ��stroke���ѽ��ɞ�����������^̖�T�����L������Ҳ�������^̖���������}���������ȱѪ�����L�sռ������ 85�����������{���������Ҫ���֣�ؽ�����r��Ч���ί��ֶΡ�
���죬MIT�w�x�R�F���Science Robotics ��4, eaax7329, 2019���l��Փ�ģ��ׄ��ſ�ܛ�w���z�C���ˣ����������t�����h�̿����£�ᘌ����sѪ�ܾW�j���M�п��ٌ����������g���Dһ������ȱѪ�����L���ί��ṩ����Ҫ�ĝ��ڹ��ߡ�
�Dһ : �ſ�ܛ�w���z�C���˵đ����I��
1��Ѫ�ܽ��������g
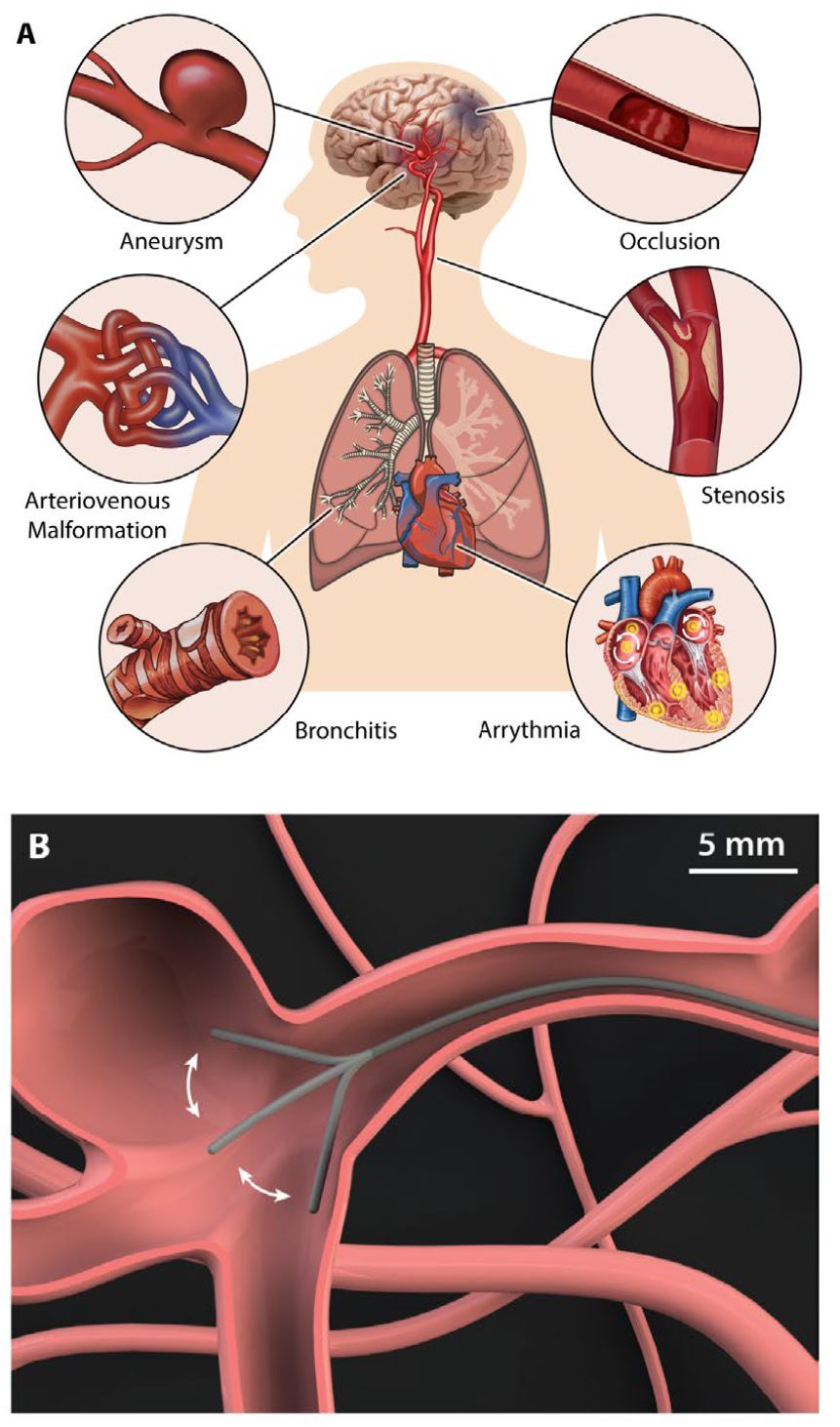
Ѫ�ܽ��������g��ͨ�^�U���Mխ���}�����ƾֲ�Ѫ����;����Ч�A�����ί�ȱѪ��Ѫ�ܲ���ԓ�gʽͨ�����t����ҕ�O����o���£���Ѫ�����Ì��z������/֧���������}�Mխ̎��ጷŲ��U������/֧�ܣ����_���֏�Ѫ�������������ʺ;ֲ�Ѫ����Ŀ�ġ����z������/֧�������^���������P��Ҫ�����á��R�����`�l�F������Ŀǰ���Ì��z���������з����x���Ժ̈́������������g�������t���{�轛�ͨ�^�ք����D�����͌��z�Ȳ��������{������/֧�ܣ��D������ʹ֮���_��̎��
�D�����F���XѪ�ܽ������g�Č��z���t����������
�����������c����ǰ�����g������Ҫ�����ׂ��ˣ�
-
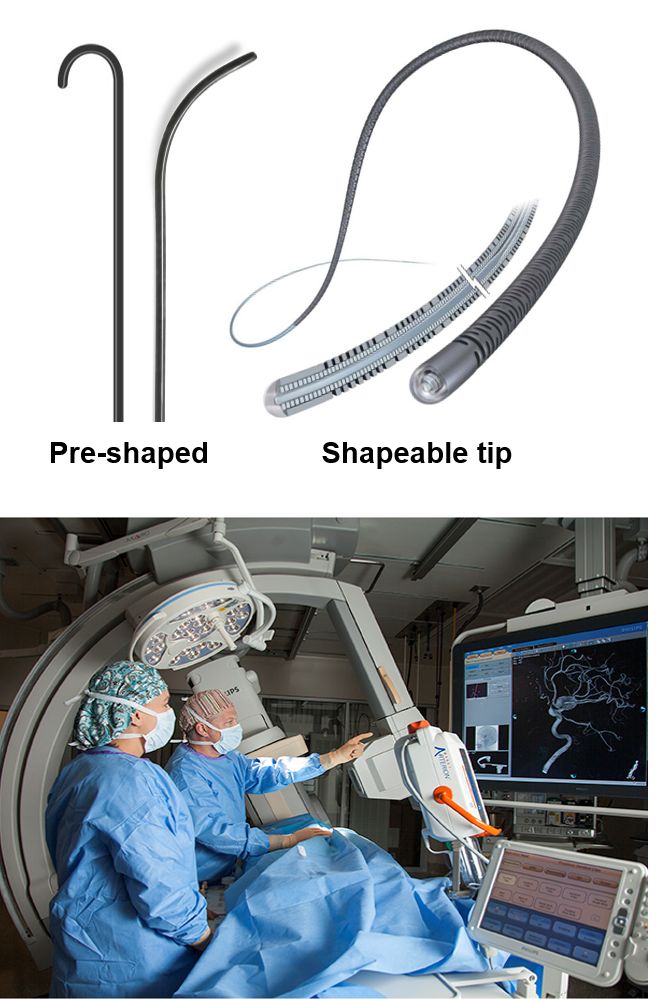
���g�r�g�^�L����Ѫ�ܽ���̎��Ҫ�ք����D���z��ʹ���M�����_�ķ�֧���ڌ��z�M��Ѫ�ܾW�jһ�ξ��x�����ڌ��z�cѪ�ܱ�Ħ����Ӱ푣�ԓ�������yһ�γɹ��������������g�^�̺��L��Ȼ������ȱѪ���XѪ�ܲ��l������һ���ؽ�ȱѪ��λѪҺѭ�h�������ܓp�����X�M�����٣�������rҲ�����á�
-
���t��ݗ�����^�����ڏ���ԓ���g���t������Ҫ�ڲ��g����Ӱ���^�쌧�zǰ���\�е���λ�ã��۷e��������ݗ����������w�����a��Ӱ푡�
-
ȱ���н����t����Ѫ�ܽ��������g�dz�����t���IJ���ˮƽ�����쾚�������g���t�������h�h���ڲ������衣��ƫ�h���л��r��^���@�N�F���Ȟ�ͻ����
2���h�̴ſ�ܛ�w���z�C����
ᘌ���ǰѪ�ܽ��������g�ľ��ͱˣ�MIT�w�x�R�F��ׄ��ſ�ܛ�w���z�C���ˡ����������t�����h�x����Դ���h�̿����£�ᘌ����sѪ�ܾW�j���M�п��ٌ����������g���ſ�ܛ�w���z�C���˵İl���ǻ����w�x�R�F�����ӡ��������ܛ�C�����t���x��ˮ���zƤ�w�ɂ�ԭ���I��ijɹ� (�D��)��

�D�����ſ�ܛ�w���z�C���˽Y����MIT�w�x�R�F��ڴ�ӡ��������ܛ�C�����t���x��ˮ���zƤ�w�ɂ�ԭ���I��ijɹ���
�w�x�R�F����Ȍ��F��ܛ������ī��ӡ��ֱ��ֻ�Ў�ʮ���װ���ܛ�w���z��ͬ�r��ܛ�w���z���F�Ů��ķֲ������磬�S��O������Ȼ�����F��ܛ�w���z�����Lһ��ʮ�����ˮ���zƤ�w���p���F��ܛ�w���z��Ħ��ϵ��ʮ�����ϡ�����Ӵň����b���£��F��ܛ�w���z�C���˿��������ⷽ��ƫ�ۡ����D������Ѳ�����sѪ�ܾW�j (�D��)��
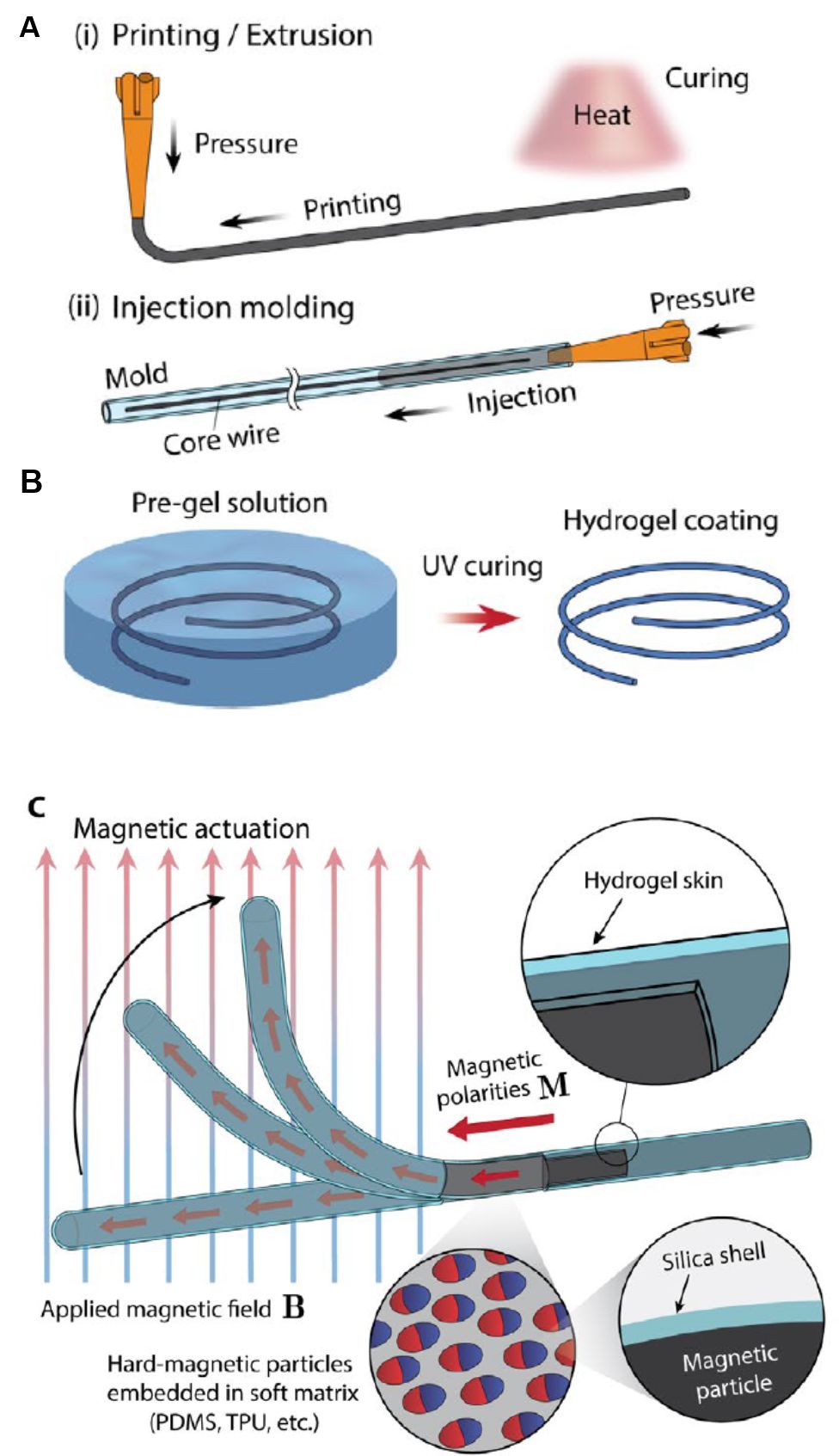
�D�ģ� �ſ�ܛ�w���z�C���˻��ڣ�A.��ӡ�F��ܛ������ī���F��ܛ�w���z��B.�ڌ��z�����L����ˮ���zƤ�w��C.�h�̴ſ��F�Ō��z����׃��
�w�x�R�F�������ʾ����Ӵň��Ŀ����£��F��ܛ�w���z�C���˿��Կ��ٜʴ_�Ĵ�Խһϵ��ֱ��2~3�����ܼ��Ų��Ŀ���ȫ�̟o���ք�Ť�D���z��Ȼ���w�x�R�Fꠌ��F��ܛ�w���z�C���ˑ��������˴�С���XѪ��ģ���С�ԓģ����ͨ�^CT���財���XѪ�ܣ�Ȼ������ܛ�����z3D��ӡ���ɡ��XѪ��ģ��߀��ע��ѪҺģ����ģ���XѪ�܃ȵ�Ħ����ճ�Եȭh��������Ӵň��Ŀ����£��F��ܛ�w���z�C���˿��Կ���Ѳ��ԓ���sѪ�ܾW�j����СѪ�܃ȱ�ֱ��ֻ��2.5�������ҡ���Ѫ�ֲܷ�̎����Ӵň������h�̿��ƌ��z�C��������Ҫǰ�M�ķ���ƫ�ۣ��o���ք�Ť�D���z�����M���A����Ѫ�ܺ��z�C����ǰ���ֻ֏�ֱ���Π�p��ǰ�M�к�Ѫ�ܱڵ�Ħ�������⣬���z�C������Ѫ�ܻ�̎�����磬Ѫ�����������M�и��N�ſ���׃�����Mһ��̎�����ί����ʂ䡣
���֮�£��F�е��քӌ��zǰ�M����Ѫ�ܱ��������@�����к�Ħ�����ڷֲ�̎��Ҫ�ք�Ť�D���z���x��ǰ�M����ǰ�M�^�̱ȴſ�ܛ�w���z�C�������ܶ࣬���Ҳ��ܵ��_���s��СѪ�ֲܷ档
�w�x�R�F��Mһ��չʾ�˶�ܴſ�ܛ�w���z�C���ˡ����磬�F����ڴſ�ܛ�w���z�C�����м���⌧�w�S���@�Ӯ��C�����_����̎�r���п����ü����̎��������Ѫ�ȡ���δ���Ĺ����У��F�ϣ���ڴſ�ܛ�w���z�C������������N���ʂ����������F���w�oˎ�����Լ���ί��ȹ��ܡ�

3������c�u
�נ�������W�������ڡ�ܛ�w�C����δ���Ƽ���������Kyu-Jin Cho���ſ،��z�C�����uՓ�f��
��One of the challenges in surgery has been to be able to navigate through complicated blood vessels in the brain, which has a very small diameter, where commercial catheters can''t reach. This research has shown potential to overcome this challenge and enable surgical procedures in the brain without open surgery.
Many researchers have been developing microscale ferromagnetic soft robots to be used for medical purposes, but they are still in the stage of basic research. However, this research by Prof. Zhao has shown great potential of ferromagnetic soft robot to be used in practical surgical procedures by using traditional catheter/guidewire design combined with ferromagnetic material coated on the wire with a soft material. It is simple, more robust and safer in design, than other technologies that have been developed so far. This new continuum robot design is practical in many ways and should be able to address the issues that brain surgeons needed.��
4������չ��
�S�����g������ĵ������������������Ӻ��쾚���g�t���IJ��㌢�ɞ�Խ�Ӽ��J�����ì�ܡ�5G�W�j���˹����ܵij����ռ����������h�����ܲٿ����g�C�����ṩ���gƽ�_���������t����Ч�ʺ�����������b���������g�C���˵��_�l���ѽ��ɞ�һ��������Q����ش�����Ľ����ԌW�ơ�ͬ�r�����w���٣�������X�����衢���K�����⡢Ƥ�w�ȣ��������ܛ�w���ϽM�ɵģ����ܛ�w�C�����ں����w���|�đ����о�����Ȼ�ă��ݡ��ſ�ܛ�w���z�C���˼����ܛ�ԡ��ͻ���3D��ӡ������ģ�͡��h�̿��ơ���ܵȃ��ݣ���δ�����g�C���˵��OӋ������ָ����һ���·���
�F���
ԓ������MIT�w�x�R�F�������ɡ�ͨӍ�����w�x�R��ʿ��MIT�K�����ڡ�ԓ�����ĵ�һ�������w�x�R�F꠵IJ�ʿ��Yoonho Kim�����������в�ʿ��German Parada�����A��W�L���W����ʥ�I��MIT�w�x�R�Fꠣ�http://zhao.mit.edu����ע�Ƅ�ܛ���Ϻ��˙C���ڿƼ��İlչ������ijɹ�������
�C���о�
-
�״����3D��ӡ�F��ܛ���Ϻ�ܛ�C�� Nature, 558, 274 (2018)
-
�״Ό��F���߿�ƣ�ڔ��ѣ�anti-fatigue-fracture��ˮ���z Science Advances, 5: eaau8528 (2019)��PNAS,116 (21) 10244-10249 (2019)
-
�״����ˮ���z���gճ�Y ��tough adhesion���ęC�������F�c���N���ϵij��gճ�Y Nature Materials, 15, 190 (2016)
-
�״�������gˮ���z�ߏ��w�ۺ��tough hydrogel-elastomer hybrid�������F����ˮ���z (anti-dehydration hydrogel) Nature Communications, 7, 12028 (2016)
-
�״����3D��ӡ���g����ˮ���z�ķ�������ӡ���N�d�����ij��g����ˮ���z�Y�� Advance Materials, 27, 4035 (2015)
-
�״�������؏��ۯB����eʯīϩ Nature Materials, 12, 321 (2013)
-
�״ΰl�F���������ް���electro-creasing������¿�Ѩ��electro-cavitation���F�� Physical Review Letters, 106, 118301 (2011)��Nature Communications, 3, 1157 (2012).
�����о�
-
�ׄ��F��ܛ�w���z�C���ˣ����b��Ѳ�����sѪ�ܾW�j Science Robotics, 4, eaax7329 (2019)
-
�ׄ���ʳ��ˮ���z��Ӳ��Á��L�ڱO�y�����w�� Nature Communications, 10�� 493 (2019)
-
�ׄ�������ˮ���z��� Advanced Materials 28, 4497 (2016)
-
�ׄ�Һ��ˮ���z�����͙C���� Nature Communications, 8, 14230 (2017)
-
�ׄ���������ˮ���z���w Advanced Materials, 28, 10244 (2016)
-
�״Ό��F���N�t���x���ϵij��gˮ���zͿ�� Advanced Healthcare Materials,6,1700520 (2017); Advanced Materials, 1807101 (2018)
-
�ׄ���3D��ӡ�������������� ��stretchable living devices��PNAS, 114, 2200 (2017)��Advanced Materials, 1704821 (2017)
-
�״Α������Wʧ���õ��˹�ճĤ PNAS, 115, 7503 (2018)
�C��
-
���xˮ���z������ӌW��hydrogel bioelectronics�� Chemical Society Review, 48, 1642 (2019)
-
ϵ�y�U��ˮ���z���� ��high strength���ęC�� Proceedings of the National Academy of Sciences, 114, 8138 (2017)
-
ϵ�y�U����Nˮ���z���g��high toughness���ęC�� Soft Matter, 10, 672 (2014)
- ���д��������n�}�M�ϸ������д��t�WԺ��Sci. Adv.���������״ſ����ܼ��g��������Ѫ�܃Ƚ�����_�Ժ��ί�Ч�� 2025-06-23
- ��h�������tɏ��Ϳ��/�Aɽ�tԺ����� AFM���g���ޏ��ߵĸ��� - һ�N�˹��g���Ƃ���·��� 2024-10-14
- �A�ƴ��������ڡ���ȫ�����ڈF� Nat. Commun.���ʹſ��z�ҙC���ˌ��F��ģ�B푑��c��ܼ��� 2024-03-12
- ���������ڣ���r������n�}�M�\�дTʿ����ʿ����ʿ�� - ���ϡ����W���������Cе�����﹤�� 2025-09-17
- ���]�S�S�F� ACS Nano�����Ƴ����� Janus ��Ĥܛ�w���� - ���F��̼�푑������� 2025-09-11
- ���ڴ�W�S������ڈF� ��Adv. Sci.���C��������ɽ��������ܛ�w�C�����c��������I����о��Mչ 2025-09-10
