�|�X�����������x��C����ͨ�^���|����֪�ⲿ�h(hu��n)�����c֮�������������ڙC�����`�ɲ������˙C���ڡ�ģʽ�R�e���I��������Ҫ�đ��á����Ƥ�w���H���Ը�֪���Ĵ�С�ͷ����Խ�������Ҍ����̼��Ķ�λ���ȿ��Գ�Խ�|�X�������g��ƽ���g�ࣨ���ֱ��ʣ�������˵��p�ֿ�����ɷdz����ɺ͏��s���΄գ�����ץȡ������Ʒ���M���`�ɲ������R�e�y������xä�ĵȡ��c���Ƥ�w��ȣ��F(xi��n)�еęC�����|�X������߀�����^���࣬������ˌ��F(xi��n)���Ľ��������Ҫ�OӋ���s�Ă������Y�����焂��������M�Ϗ��s�Ĕ�(sh��)�Wģ�ͣ��ڌ��F(xi��n)�������r�£��Пo��ͬ�r���F(xi��n)���ֱ��ʙz�y���ȵȣ��O��������˙C�����ڈ�(zh��)�Џ��s�΄��ϵ�������
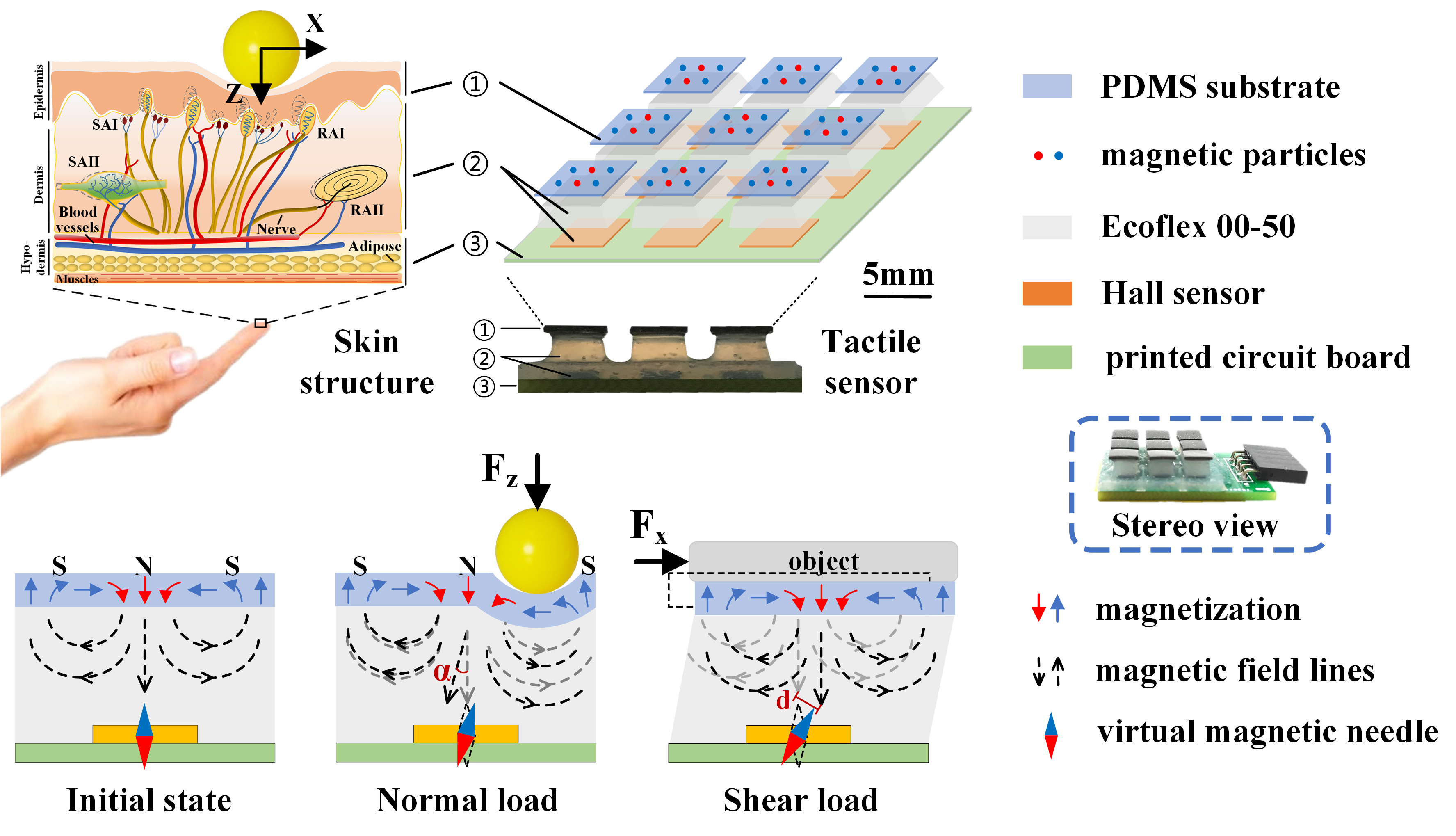
�D1. ����Ƥ�w�ĽY������ԭ��
������۳��д�W�����t(y��)�W����ϵ�ꁆ�������n�}�M�c��۴�WӋ��Cϵ�˼ѽ����n�}�M�����������һ�N���ڴ��Ա�Ĥ���|�X���������Y����ȌW���㷨�����F(xi��n)�˙C�����|�X���������Խ���ͳ��ֱ��ʣ�������Ƥ�w���|�X��֪�ṩ���µ�˼·�����P�ɹ��ԡ�Soft magnetic skin for super-resolution tactile sensing with force self-decoupling���Խ���ij��ֱ������Դ���Ƥ�w�������}���ڽ��հl(f��)���ڡ�Science Robotics���ƌW���C���ˣ����ϡ�
��D1��ʾ��ԓ�|�X�������ĺ�����һ�ӽ�(j��ng)����༉���ҴŻ��Ĵ�Ĥ��Ƕ����ӡˢ�·���ϵĻ����������M�ɡ���Ĥ�ͻ���������֮�g������䲻ͬ��Ⱥ͏��ԵĹ��z���Á��{(di��o)��(ji��)���������`���Ⱥ����̡���������ʩ���ڴ�Ĥ�ϕr���������������y�����ɴ�Ĥ׃��������Ĵň�׃�����M�����Ԝy������ʩ�������Ĵ�С�ͷ���
���@�N������O�����ҴŻ������ڌW�g�ϱ��Q��Halbach Array��Halbach��У�����һ����Ҫ���c���ǿ���������һ�ȴň���ͬ�r�܉�O��ļӏ���һ�ȴň���ԓ���g���H�����Ӽ��������őҸ���܇��늴��ڵ�ǰ���I��������Ҫ�đ��ã����҂�?n��i)ճ�������ʹ�õı����N��Ҳ��������Ƽ��g�����ꁆ���ᵽ�����҂��n�}�M���˼��n�}�M�������Lԇ�аl(f��)һ�N����Ƥ�w���ܵ��|�X������������҂��n�}�M��Ҫ�����͙C�����о���ǰ�ڹ������ڴ��Ա�Ĥ������һЩ�e�ۣ�Nature Communications, 9(3944), 2018;Advanced Science, 7(13), 2020; Science Robotics, 5(48), 2020�������Գ����x���˴��Ա�Ĥ�Ľ�Q���������о��^���У��Z��貣����µ�һ���ߣ���۳��д�W�����t(y��)�W����ϵ���x��ʿ�����l(f��)�F(xi��n)Halbach Array���ˆȴň����������һ������������|(zh��)�����Ѵ�Ĥ�����ҴŻ�����ŸБ�����B�ʹň�����RB����x-zƽ���(n��i)����Ȼ����ģ����ŸБ�����Bֻ��z�������P���ň�����RBֻ��x�������P����D2��ʾ�����@�ӣ�������Fz��ݔ��ֻ�cz�������P��������Fx��ݔ��ֻ�cx�������P��ʽ1�������о��Խ���ܵ��|�X�������ṩ�˿��ܡ���
 ��ʽ1��
��ʽ1��
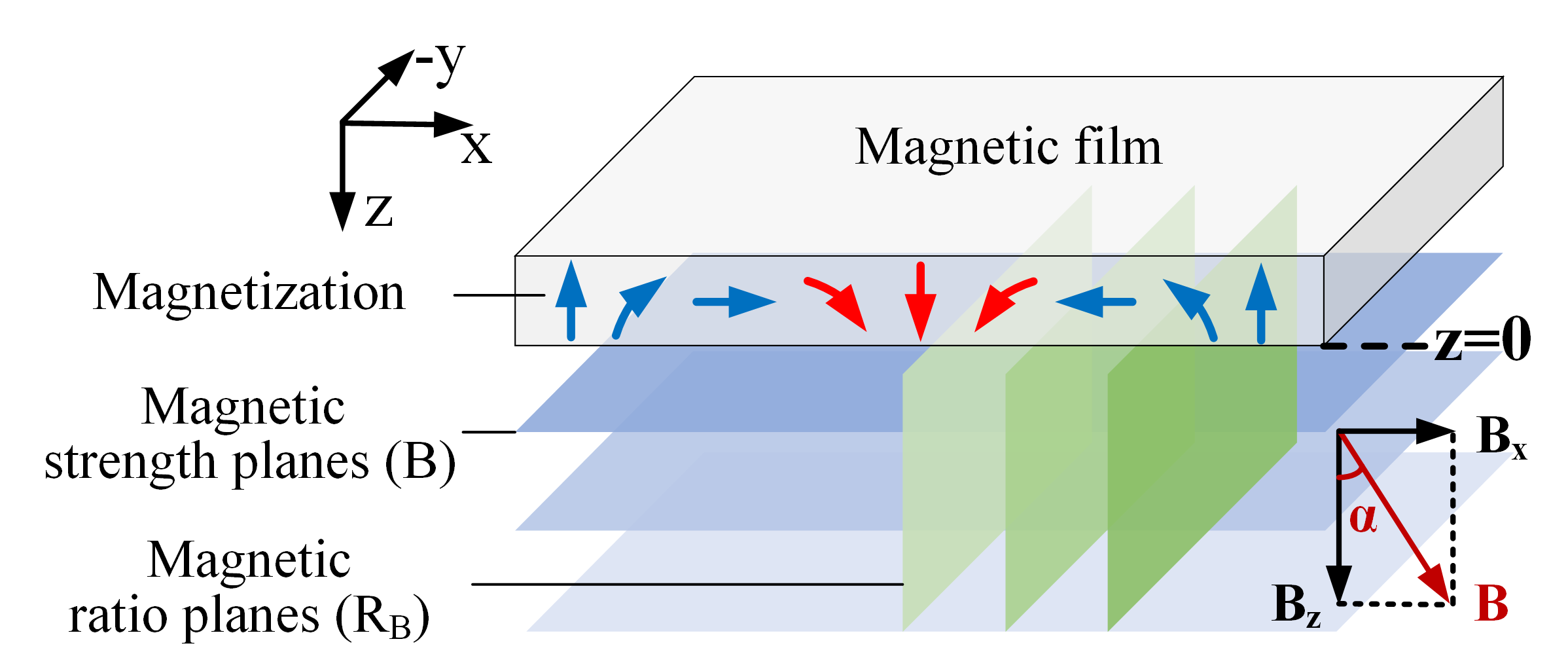
�D2.�ŸБ�����ƽ��ʹň�����ƽ�棨��Ȼ���ʾ��D
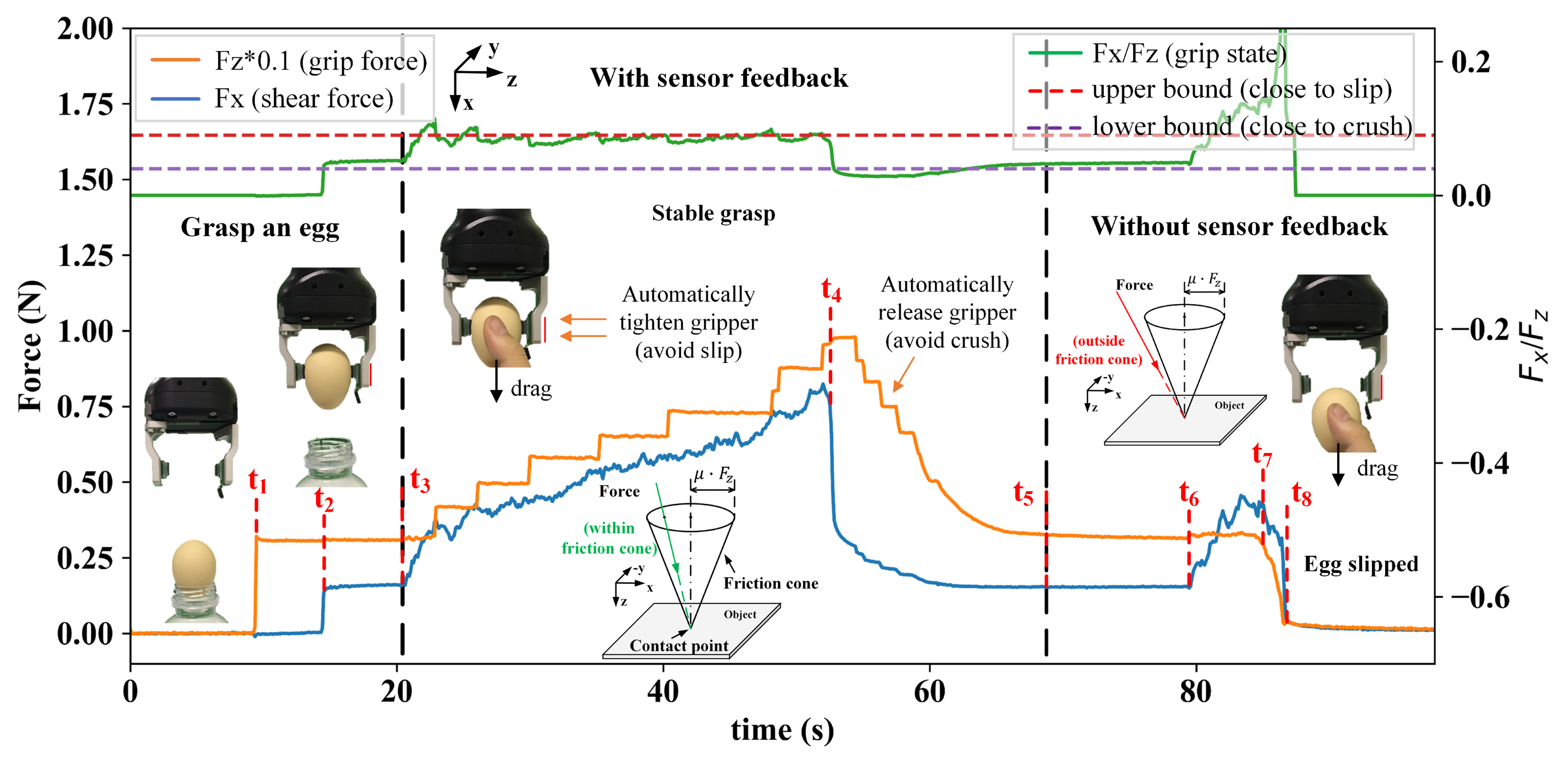
�����Ĵ���Ƥ�w�����ṩ���������������������Ĝy�����o���_��ϣ�����˿��Խo�C�����ṩ�����_����������ҕ�l1չʾ�ˌ�����Ƥ�w�N�ڙCе�����M�����m��ץȡ�u���đ��á��_ʼ�r���Cе��δ�M��ץȡ���A����Fz���d�������������Fx�����㣬���Cе�֊Aס�u���r(t1),�A����FzѸ������ֱ���u��������r(t2),�����u�����������ã�������FxѸ�����˕rʩ��һ���ⲿ�ɔ_����������ק�u��(t3)���������_ʼ��u�����˲�ʹ�u�����䣬�Cе���Ԅ�����A������ʹFx/Fz�ı�ֵʼ�KС�ڻ���߅�磨����������Ħ���F�ԃ�(n��i)��������ȥ�ⲿ�ɔ_��(t4)���Cе���_ʼ�Ԅ����_�Aצ�������u�����A�飬�Ķ����F(xi��n)�������ⲿ�ɔ_�r�����m��ץȡ�����飩���w�İ�ȫ���������錦�Ȍ����]�д���Ƥ�w�ṩ���������r�����ڊA���������Կ˷��ⲿ�ɔ_���u����ק��(t8)��
�ӈD1. ���������������m���u���A��
�D3. ���������������m���u��ץȡ
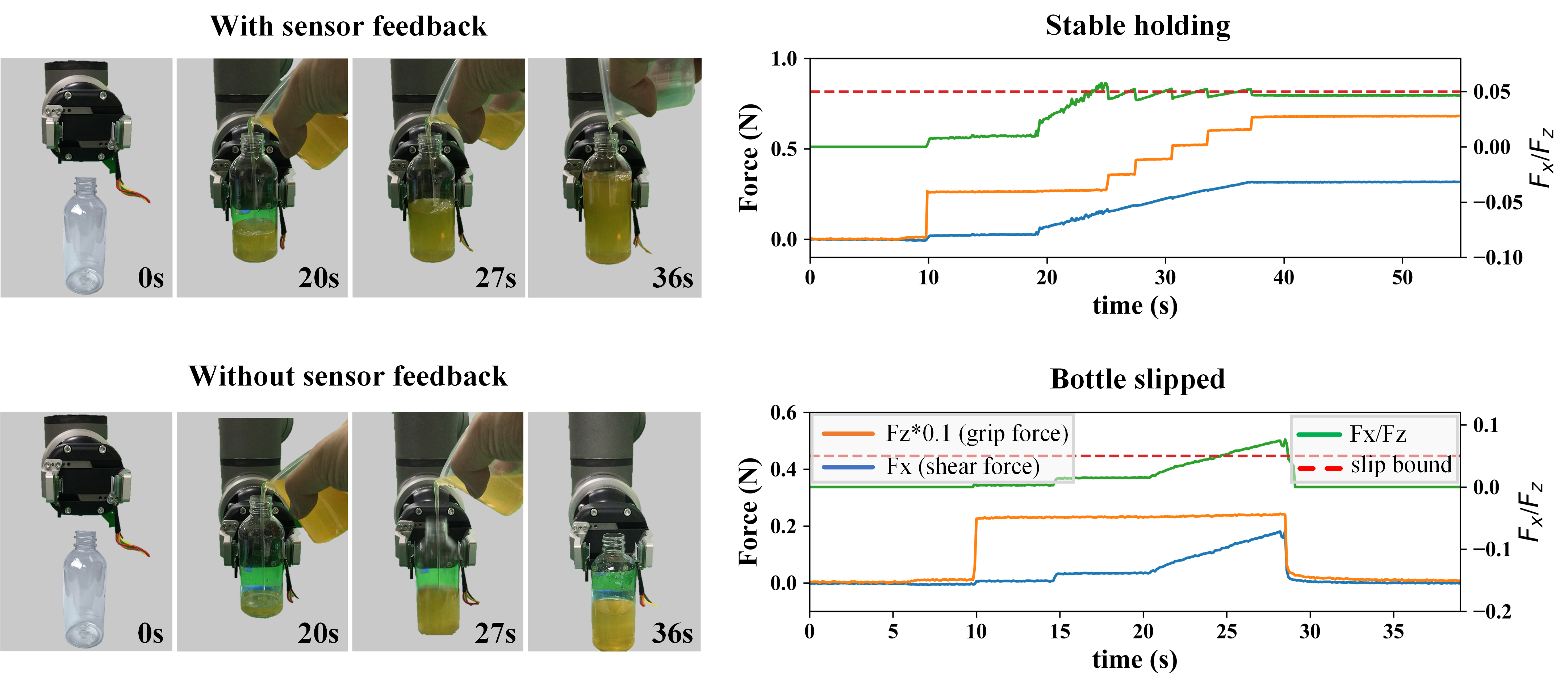
��Ƶأ�չʾ��������ô���Ƥ�w���������M�����m���{(di��o)��(ji��)�Cе�ֵĊA�o�����Է�(w��n)���ĊA��һ������עˮ��ˮƿ������ˮƿ�в���ע��Һ�w�r��������Fx��u����ˮƿ�ЏęCе���л����څ�ݣ�Fx/Fz�ı�ֵ�ӽ�����߅�磩���˕r�Cе���Ԅ������ˊA����Fz���Ķ�������ˮƿ�Ļ��䣬�΄ճɹ������錦�Ȍ����]�д���Ƥ�w�ṩ���������r��ˮƿ��עˮ���^���Џ����л��䣬�΄�ʧ����
�D4. ���������������m��ˮƿץȡ
�����ܾ��_�Ľ��������Ĵ�С�ͷ���ԓ����Ƥ�w߀�����|�X���ֱ��ʣ��������̼��Ķ�λ���ȿ��Գ�Խ�������������ֱ��ʣ��ɂ����І�Ԫ֮�g�ľ��x������D5��ʾ��һ��С���ڴ���Ƥ�w������3x3���І�Ԫ���У��Ă��І�ԪS5�ϣ�ͨ�^���Է�������������x,y,z�����ϴ�ͨ���ܶȵ�׃�������Դ_��ԓС���cƤ�w�Ľ��|λ����S5�����Ͻǣ��Mһ����ͨ�^��(j��ng)�W(w��ng)�j�Ķ���Ӌ�㣬С��Ľ��|λ�ÿ��Ա����_��λ��S5���Ͻǵģ�X,Y��̎��ԓ��λ����(0.1mm)�����_������Ƥ�w�����ֱ���(�������І�Ԫ�ľ��x6mm)��60����
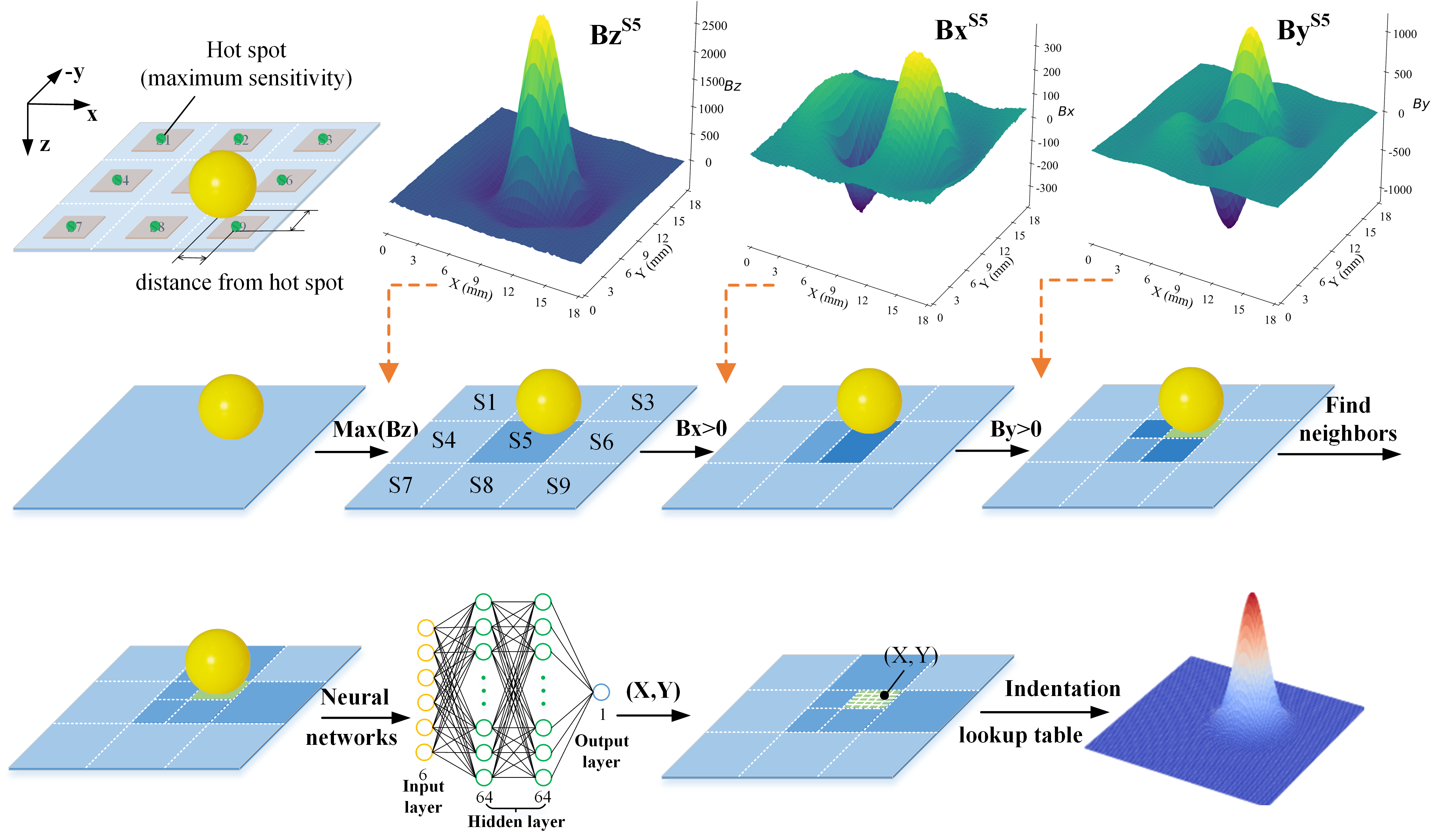
�D5. ����Ƥ�w���|�X���ֱ���ԭ��ʾ��
�о��F��Ãɂ���ͬ�Ĉ���չʾ���|�X���ֱ��ڙC�����I��đ���ǰ�����ڵ�һ��չʾ�У�ҕ�l3�����о��ˆT���ó��ֱ��ʌ��rۙ���ڴ���Ƥ�w�ϝL�ӵ�С��Ľ��|λ�úͽ��|����С���ڵڶ���չʾ�У��D6��ҕ�l4�����о��ˆTֻʹ����һ�����І�Ԫ������˙Cе�۵������\�ӷ����ϡ��¡�ǰ�������ң������о��ˆT���h�̲ٿ��£��Cе�ۿ�����ɴ�ᘵľ���������
����ȌW���ڙC�����I������Խ��Խ�V���đ��ã������҂���ǰ�ڹ����У��҂�������ȌW�������F(xi��n)�˶��C���˵���ײ�z�y�c��ֹ��International Journal of Robotics Research, 39 (7), 2020����ᘌ��ض�Ӳ���OӋ�f(xi��)ͬ�������㷨���܉��Mһ��ͻ��Ӳ��������ƿ�i���@�ø��õ�Ч�������˼��v�������҂�ᘌ���Ĥ�������OӋ����ȌW�����������䳬�ֱ�����ߵ���60�����_�����c���Ƥ�w�ij��ֱ��ʣ��s40�����ɱȵij̶ȡ�����ԁ����҂������ڌ��F(xi��n)���ܵ�ͬ�r���O��Ĝp�ٙC����Ƥ�w�еĂ��І�Ԫ�c�������Ķ��������Ƥ�w�������ԡ��@��δ�����˹�Ƥ�w���w�ڙC����ȫ����ʹ�C���˓��к����һ�ӵ�ȫ���|�X��֪�������P��Ҫ����

�D6. �����|�X���ֱ��ʵ��b�ش��
�о��ˆT���չ�������������Խ���ܵij��ֱ��|�X��֪�ڙC�����I���кܴ�đ��Ý����������x��C�����`�ɲ����ճ���Ʒ������������˙C�����İ�ȫ�ԣ����S�ڲ��h�Č��������w���˹�Ƥ�w�ļ�ͥ�C���ˌ��ɞ��҂�?n��i)ճ������в���ȱ�ٵ�һ���֡��ڽ��Ĺ����У��҂�ϣ���܉��_�l(f��)���ڸ���S���Ͻ���Ĵ���Ƥ�w����ᘌ���ͬ�Ĉ����OӋ�ض��ij��ֱ����㷨�����F(xi��n)Ӳ����ܛ��������ںϣ��Ķ�ʹ����Ƥ�w�đ��È������Ը��ӏV������
�ꁆ�����˼���ԓ�����Ĺ�ͬͨӍ���ߣ��Z�����Փ�ĵ�һ���ߣ������F������ɆT������۳��д�W������(n��i)��÷¡��W���Ϸ��Ƽ���W��
ԓ�Ŀ�о��õ���NSFC��(y��u)���Ŀ���۰ĵ^(q��)��61922093,NSFC-����(li��n)�����c�ĿU1813211,���UGC�Ŀ11211720 ��11207818��11202119��NSFC/RGC(li��n)���о��ĿN_HKU103/16�Լ������ЌW�Ʋ����ĿJCYJ20200109114827177�Ĺ�ͬ�Y����
����朽ӣ�Y. Yan, Z. Hu, Z. Yang, W. Yuan, C. Song, J. Pan*, Y. Shen*, Soft magnetic skin for super-resolution tactile sensing with force self-decoupling. Sci. Robot. 6, eabc8801 (2021). DOI: 10.1126/scirobotics.abc8801
https://doi.org/10.1126/scirobotics.abc8801
- �B�T��W������ AFM�������ݶȳ�����Y�����¼��(q��)���|�X�������������m��ץȡ 2025-04-28
- ���T��W�ܱ���F� Adv. Mater. : ���ڷ����Ż����Y���ġ�ճ-�����^���ؘ� 2025-03-21
- ��Ъ����������ͦ���ڈF� Adv. Mater.����ƣ������׃ɫˮ���z - �x�������|�X������ 2024-10-16
- ���_��W�S����ڡ��R�Ę������о��T AFM�����е��l�����Եď���-��늅f(xi��)ͬ�ݶȳ������������l�V���������� 2024-03-30
- �п�Ժ���������������Դ��Ա�Ĥ�c�����о���ȡ��ϵ���Mչ 2018-08-17
- ������ȫ�����Ա�Ĥ�c�{�״ŌW���h�ڌ������_ 2010-06-09
- �B�������� AFM����������(n��i)�ֺ͛Q�ߵĿɾ�������|�XƤ�w 2024-09-15
�\���Pע�߷��ӿƼ�

- 2026����ߌ��Ї�����Ұl(f��)չ...
- �����IƱح300+���h��I(y��)�R��...
- �P���Ж|�����L���Ѓx�����{...
- �f����Ŀ �ذ��_�֣�2025�C...
- ICIE���H(�V��)Ϳ�Ϲ��I(y��)չ�[...
- �_չ�ڼ����ۄ�������朄�δ...
- 9������Ҋ���£�AI�(q��)��+���a(ch��n)...
- �P���e�k�ڶ�ʮ�����Ї����H...
- �R�ۼ�˃x�� ����ȫ���̙C ...
- CPHI����չ����҃x���c�O��...
- ���ܹ��A��朆���������22��...