����Ȼ���������w�Ć��l(f��)����ܷ���ܛ�w�C(j��)�����ѽ�(j��ng)�ɞ��о����c(di��n)���c���y(t��ng)�Ą��ԙC(j��)������ȣ�ܛ�w�C(j��)���˾��и߶ȵ�협�(y��ng)�Ժͭh(hu��n)���m��(y��ng)�ԡ��ڸ��Nܛ�w�(q��)��(d��ng)�����У�Һ�������w����(ji��n)�Q��LCE���������(d��ng)�Ϳ�����(d��ng)���߿ɼӹ��ԺͿɾ����Ե����ܶ������P(gu��n)ע���������(sh��)�F(xi��n)�е�LCE�w�S��(zh��)�����H���چ��S������׃��ģʽ���o(w��)����(sh��)�F(xi��n)����΄�(w��)����ď�(f��)�s�\(y��n)��(d��ng)������LCE�w�S��һ�S���ό�(sh��)�F(xi��n)���S�ɾ���׃��(g��u)����ܛ�w�C(j��)�����I(l��ng)����ش�����(zh��n)֮һ��
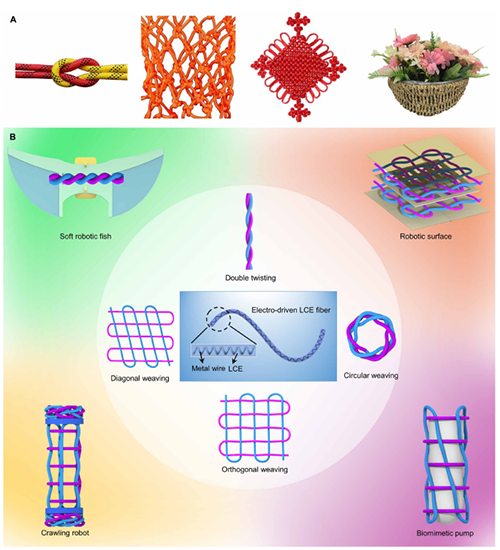
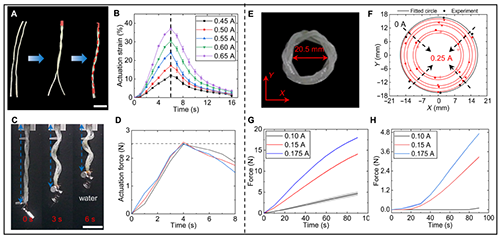
�����Y(ji��)�Kӛ�����_(k��i)ʼ�����ھ������g(sh��)���˂�����������Ȼ���˹��w�S��һ�S���Ϙ�(g��u)�����(f��)�s�Ķ��S�������S�Y(ji��)��(g��u)���D1a����Ȼ�������y(t��ng)�����ĎΈD��ͨ�������ģ���(du��)�������I(y��)֪�R(sh��)����ه����(f��)�s�����칤ˇ���ض����O(sh��)���������w�S�(q��)��(d��ng)����ܛ�w�C(j��)�����еđ�(y��ng)�á��㽭��W(xu��)���պ���W(xu��)Ժ�쏩���ڈF(tu��n)�(du��)��������K�Y(ji��)��ˇ���l(f��)��LCE�w�Sܛ�w�(q��)��(d��ng)���O(sh��)Ӌ(j��)�������D1b���������A(y��)���O(sh��)���ľ�����ʽ���ֹ��������g(sh��)���܉�?q��)��F(xi��n)��S׃�νY(ji��)��(g��u)������ԓ�O(sh��)Ӌ(j��)���ԣ��������ķNLCE�w�Sܛ�w�(q��)��(d��ng)����������ܛ�w�(q��)��(d��ng)����׃����������ģ��������(sh��)ֵ��ԇ�(y��n)�(y��n)�C�˸��N�(q��)��(d��ng)����׃���������D2���D3�������þ���LCE�w�Sܛ�w�(q��)��(d��ng)������(g��u)���˿ɾ��̙C(j��)�����桢�����K���l(f��)��ܛ�w�á����ЙC(j��)���˺��΄�(d��ng)�C(j��)���˵�һϵ��ܛ�w�C(j��)���ˣ��(y��n)�C��ԓ�O(sh��)Ӌ(j��)���Կ��Բ���һ�S���ό�(sh��)�F(xi��n)��(f��)�s�����S�ɾ���׃��(g��u)�\(y��n)��(d��ng)�����y(t��ng)�K�Y(ji��)��ˇ���е��O(sh��)Ӌ(j��)�`����ʹ���܉�(g��u)�����N���S��?f��)�Y(ji��)��(g��u)������ԓ�O(sh��)Ӌ(j��)���Կ����M(j��n)һ���،����ڶ���(q��)��(d��ng)���͙C(j��)���˵đ�(y��ng)�÷��������⣬�mȻ��(q��)��(d��ng)LCE�w�S�DZ������в��õ���Ҫ���ϣ�����������O(sh��)Ӌ(j��)���Բ����������@�N���ϡ����(d��ng)�����w�S���Π�ӛ���Ͻ��w�S�ȸ��Nһ�S���Ͽ��ԟo(w��)�p���ɵ�ԓ�O(sh��)Ӌ(j��)����С�
2025��2��19�գ�ԓ��������Weaving liquid crystal elastomer fiber actuators for multifunctional soft robotics�����}�l(f��)���ڡ�Science Advances���ϣ�Sci. Adv. 2025, 11, ads3058���������x��(d��ng)�ڵ�Featured Image������Weaving liquid crystal elastomer fiber actuators�����}�������ڿ��W(w��ng)վ���(y��)�����µ�һ�������㽭��W(xu��)���պ���W(xu��)Ժ��ʿ����[���쏩���ڞ�ͨӍ���ߡ�ԓ�о��õ���(gu��)����Ȼ�ƌW(xu��)�����(xi��ng)Ŀ��12472166, 91748209����佽���(sh��)�(y��n)�Ҍ��(xi��ng)�(xi��ng)Ŀ��֧�֡�
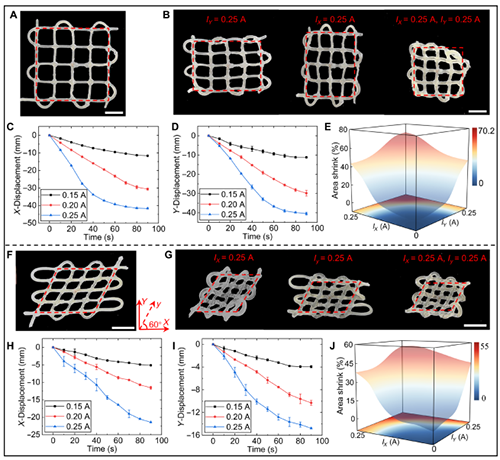
�D3 OWA�(q��)��(d��ng)����DWA�(q��)��(d��ng)�����Ա���
ԓ�����LjF(tu��n)�(du��)�����P(gu��n)�ڿɾ��̺Ϳ��؏�(f��)����׃��(g��u)ϵ�y(t��ng)���P(gu��n)�о��������M(j��n)չ֮һ�������\(y��n)�dƽ�_(t��i)���d���g�����ƺ���܉���켼�g(sh��)����Ȳ��ߣ��F(xi��n)�еĺ������Y(ji��)��(g��u)�y�Ԍ�(sh��)�F(xi��n)����ߴ硣���y(t��ng)�Ą��ԙC(j��)�����y�Ԍ�(sh��)�F(xi��n)�������g������С�ͻ����ڏ�(f��)�s�ĺ�������΄�(w��)������Ժ��m��(y��ng)���д���������ˈF(tu��n)�(du��)�����ڴ��Ϳ�չ�_(k��i)���g�Y(ji��)��(g��u)�����g�C(j��)���˵ȏ�(f��)�s��?c��)����ϵ�y(t��ng)�����W(xu��)�C(j��)���̈́�(chu��ng)���O(sh��)Ӌ(j��)�����о��������(l��i)������˄�?c��)���ϽY(ji��)��(g��u)�ɾ��̌���׃��(g��u)/׃�����O(sh��)Ӌ(j��)������Sci. Adv. 2025, 11, eads3058; Chinese J. Aeronaut. 2022, 35, 7; Smart Mater. Struct. 2023, 32, 8; Sensor. Actuat. A-Phys., 2025, 382, 2����̽���������W(xu��)���Կ��؏�(f��)���̺͙C(j��)е�����{(di��o)�ؙC(j��)����Nat. Commun., 2023, 14,4329; Int. J. Mech. Sci., 2025, 286, 109889; Cyborg Bionic Syst., 2024, 5, 0111�����l(f��)չ��׃��(g��u)�^(gu��)������(f��)�s���W(xu��)�О齨ģ�ͷ��淽����Chinese J. Aeronaut., 2024, 37, 4; Adv. Space Res., 2024, 74; Structures, 2024, 61, 106082; J. Aerospace Eng. 2021, 6672177�������Dͻ�ƺ������Y(ji��)��(g��u)�Ϳ��g�C(j��)�����ژ�(g��u)�͡��ߴ硢���ȡ��m��(y��ng)�Եȷ�����O(sh��)Ӌ(j��)߅�硣
朽ӵ�ַhttps://www.science.org/doi/10.1126/sciadv.ads3058
��Ƹ����
- ��������c���ڈF(tu��n)�(du��) AFM����һ�����S�����r�|��(r��n)������ - ��(sh��)�F(xi��n)Ħ�������ąf(xi��)ͬ�����c��ɢ 2026-02-01
- ��������·���ڈF(tu��n)�(du��) JACS���ۺ��ホ�������ЙC(j��)��ܲ���Ĥ�������ڳ���(qi��ng)�͉�̼���� 2026-01-07
- �|�A��W(xu��)��ҫ��/���l(w��i)ܲ�F(tu��n)�(du��) Nat. Commun.���x���;ۺ���ԭλ���Ӿ�����MOFs - ��(sh��)�F(xi��n)��Ч��������x�Ӳ��@ 2025-08-13
- ���ݎ�����W(xu��)������/�ǰغ�F(tu��n)�(du��) Nat. Commun.���ɾ����(q��)��(d��ng)��JanusҺ�������w�w�S 2026-02-04
- ����������W(xu��)���������ڈF(tu��n)�(du��) AFM�������p��(d��ng)�B(t��i)���r(ji��)�W(w��ng)�j(lu��)�Ŀɻ���Һ�������w - ���ڶ��ΑB(t��i)�ɳ��m(x��)��(y��ng)�� 2026-01-12
- ������ڈF(tu��n)�(du��) Adv. Mater.����?c��)Ტ�?j��) - �c(di��n)������Һ���߷��� 2026-01-08
�\(ch��ng)���P(gu��n)ע�߷��ӿƼ�

- 2026����ߌ��Ї�(gu��)��(sh��)�(y��n)�Ұl(f��)չ...
- �����I(l��ng)Ʊح300+���h��I(y��)�R��...
- �P(y��ng)���Ж|�����L���Ѓx�����{(l��n)...
- �f(w��n)����Ŀ �ذ��_(k��i)�֣�2025�C(j��)...
- ICIE��(gu��)�H(�V��)Ϳ�Ϲ��I(y��)չ�[...
- �_(k��i)չ�ڼ����ۄ�(sh��)������朄�(d��ng)δ...
- 9������Ҋ(ji��n)���£�AI�(q��)��(d��ng)+��(gu��)�a(ch��n)...
- �P(gu��n)���e�k�ڶ�ʮ�����Ї�(gu��)��(gu��)�H...
- �R�ۼ�˃x�� ����ȫ���̙C(j��) ...
- CPHI����չ��(sh��)�(y��n)�҃x���c�O(sh��)��...
- ���ܹ��A��朆���������22��...
- ������/���f/�Y�� JACS���l(f��)...
- ��ɽ��W(xu��)��־�x�����w�����...
- ���������������ֈF(tu��n)�(du��) Angew...
- �Ϻ�����/��������(sh��)�(y��n)��...
- ���t(y��)��һ��Ժʢ�������/�A...
- �пƴ���Ƙ�(l��)������������/...
- �����������/������������...
- �㹤��������/�~��(hu��)Ҋ(ji��n)�n�}�M ...
- ��������-��־�F(tu��n)�(du��) AFM �C��...
- �|�ϴ�W(xu��)��������ڈF(tu��n)�(du��) Nat...
- ���ݴ�W(xu��)Ҧ����/κ��/����Ӱ...